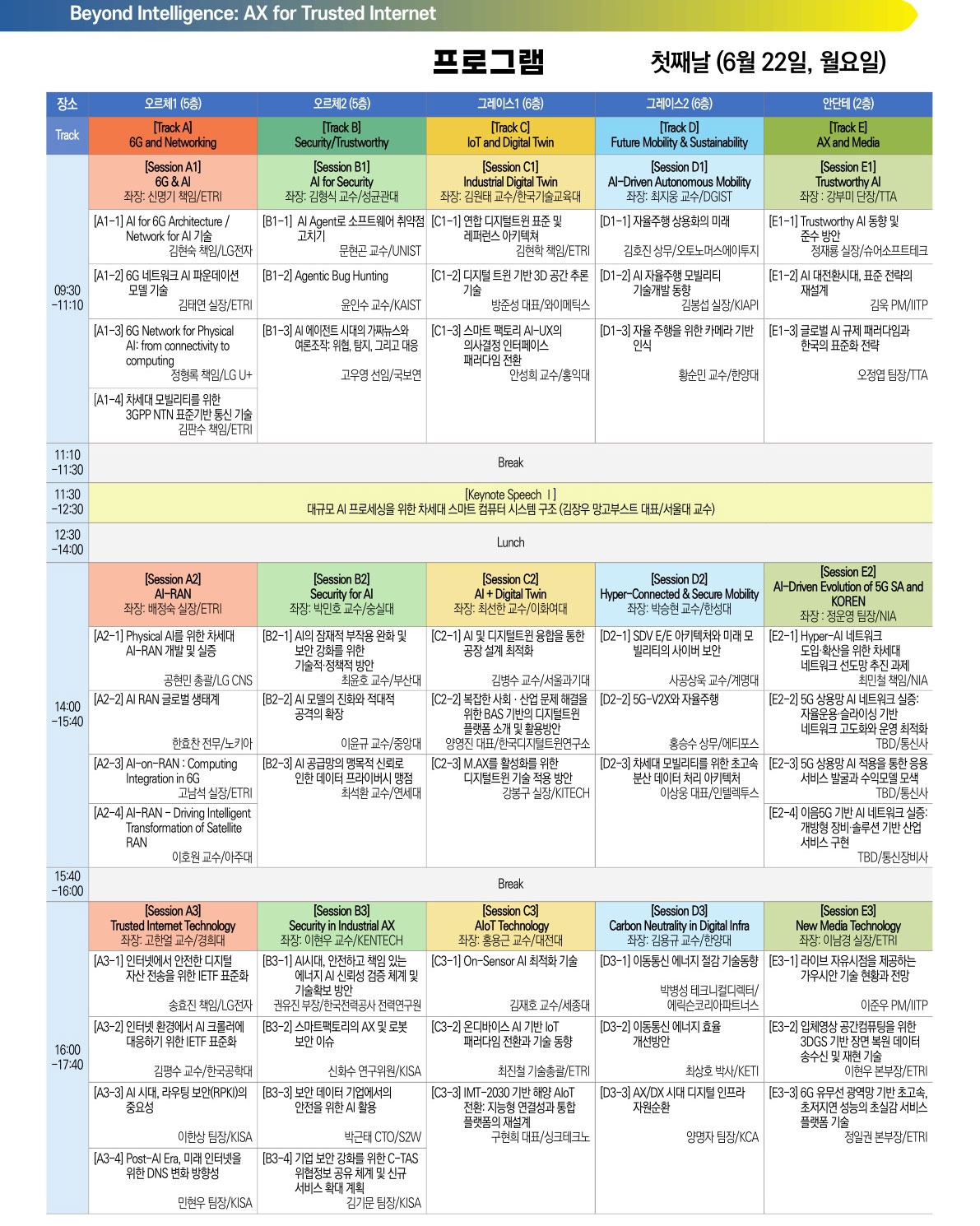
김원태 교수, 26년 6월 22일에 개최되는 KRNET 2026에서 Industrial digital twin [Session C1]의 좌장을 맡아 프로그램 운영을 진행하였음
일자: 2026-06-22
News
Smart CPS Lab의 최신 소식과 공지입니다.
전체 91
김원태 교수, 26년 6월 22일에 개최되는 KRNET 2026에서 Industrial digital twin [Session C1]의 좌장을 맡아 프로그램 운영을 진행하였음

김원태 교수가 덴마크 GINP Robotics 2026의 "Korea · Denmark · India Robotics R&D, Market Insight Session"에서 "Korean Robotics R&D Insights for Danish and Indian SMEs"를 주제로 발표를 진행하였다.
권준형, 이영훈 박사과정과 이민석, 정찬우, 김성민, 문주성 석사과정이 2026년 4월 29일 ETRI 국제협력회의실 세미나에 참석하였다.

Smart CPS Lab은 2026년 4월 21일 ETRI 김원종 실장을 초빙하여 스마트시티를 위한 AI 기술 주제의 전문가 세미나를 개최하였다.
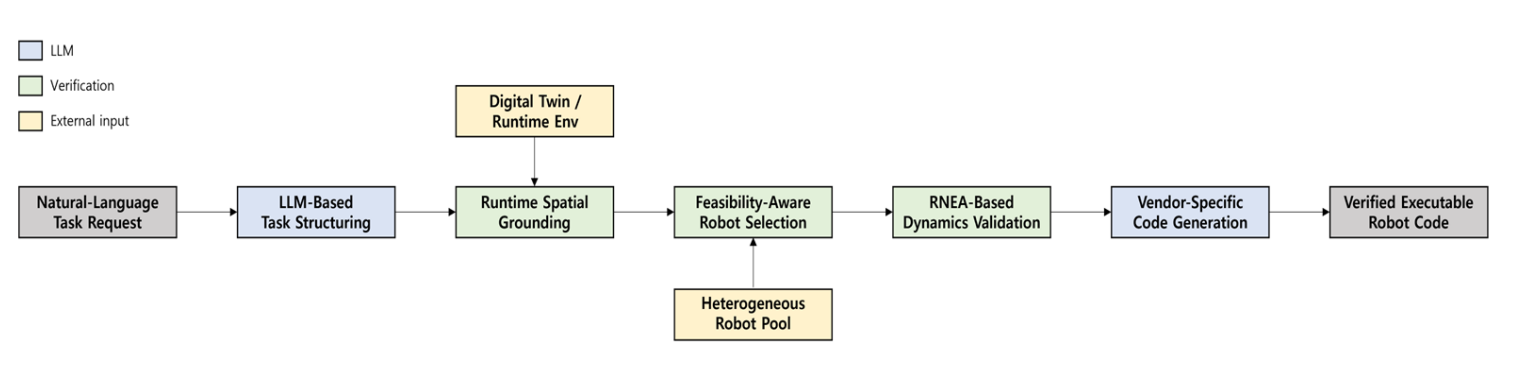
이영훈 박사과정의 논문 "LLM-Based Adaptive Control Code Generation Framework with Digital Twin-Integrated Verification for Heterogeneous Robot Systems"가 2026년 4월 16일 MDPI Applied Sciences에 출판되었다. 본 논문은 Tae-Min Nam, Deun-Sol Cho, Won-Tae Kim과의 공동 연구로 수행되었다.
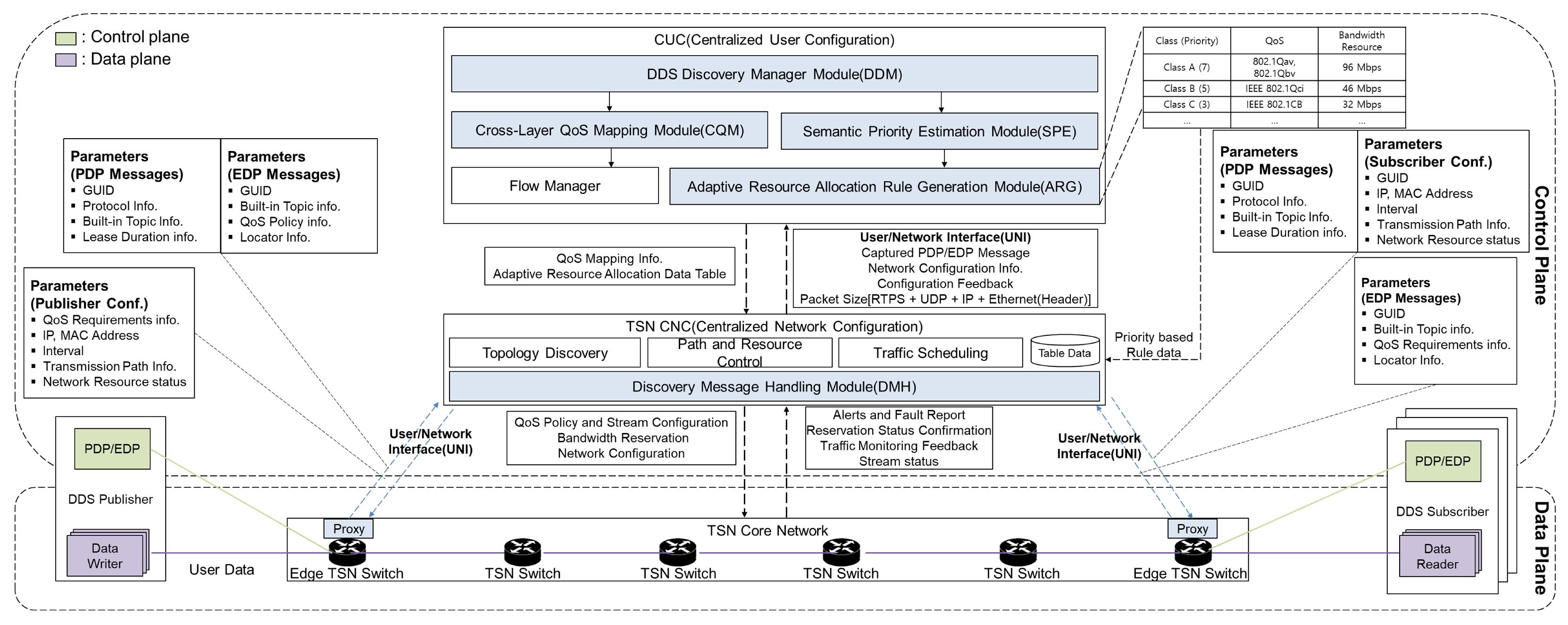
남태민 박사과정의 논문 "DDS-over-TSN Framework for Time-Critical Applications in Industrial Metaverses"가 2026년 4월 8일 MDPI Applied Sciences에 출판되었다. 본 논문은 Seong-Jin Yun, Won-Tae Kim과의 공동 연구로 수행되었다.
권준형 박사과정이 2026년 4월 8일 한국정보통신기술협회(TTA) 메타버스 콘텐츠 프로젝트그룹(PG610) 제71차 정기회의에 참석하여 표준화 과제 2건을 제안함.
한국연구재단 핵심기술과제(타입 B) "산업형 휴머노이드의 제조숙련기술 전수를 위한 멀티모달 암묵지 디지털화 및 뉴로-심볼릭 작업지능 연구"가 최종 선정되어 2026년 3월부터 2031년 2월까지 진행한다.
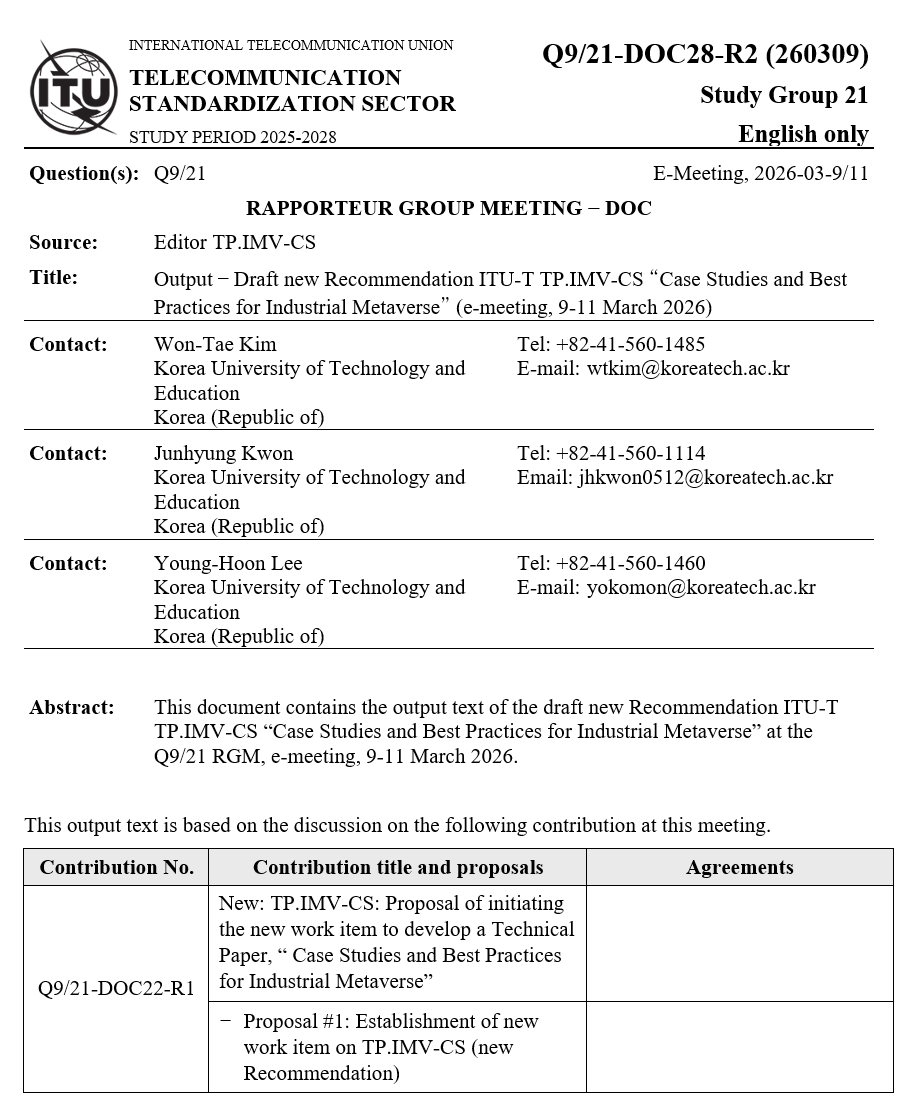
SmartCPS 연구실의 김원태 교수, 권준형, 이영훈 박사과정이 국제 표준회의인 ITU-T Q9/21에 참가하여 기존 워크 아이템인 FSTR.MV-MML의 신규 권고안을 승인 받았으며, 새로운 워크 아이템 HSTP.IMV-CS를 제안해 승인을 받아, SmartCPS 연구실은 국제 표준 무대에서 2건의 워크 아이템을 주도하게 됨.
APPARATUS AND TECHNIQUE FOR LINK ADAPTATION BASED ON INTERFERENCE RECOGNITION (12568444)- 출원에서 특허되었음을 안내드립니다.
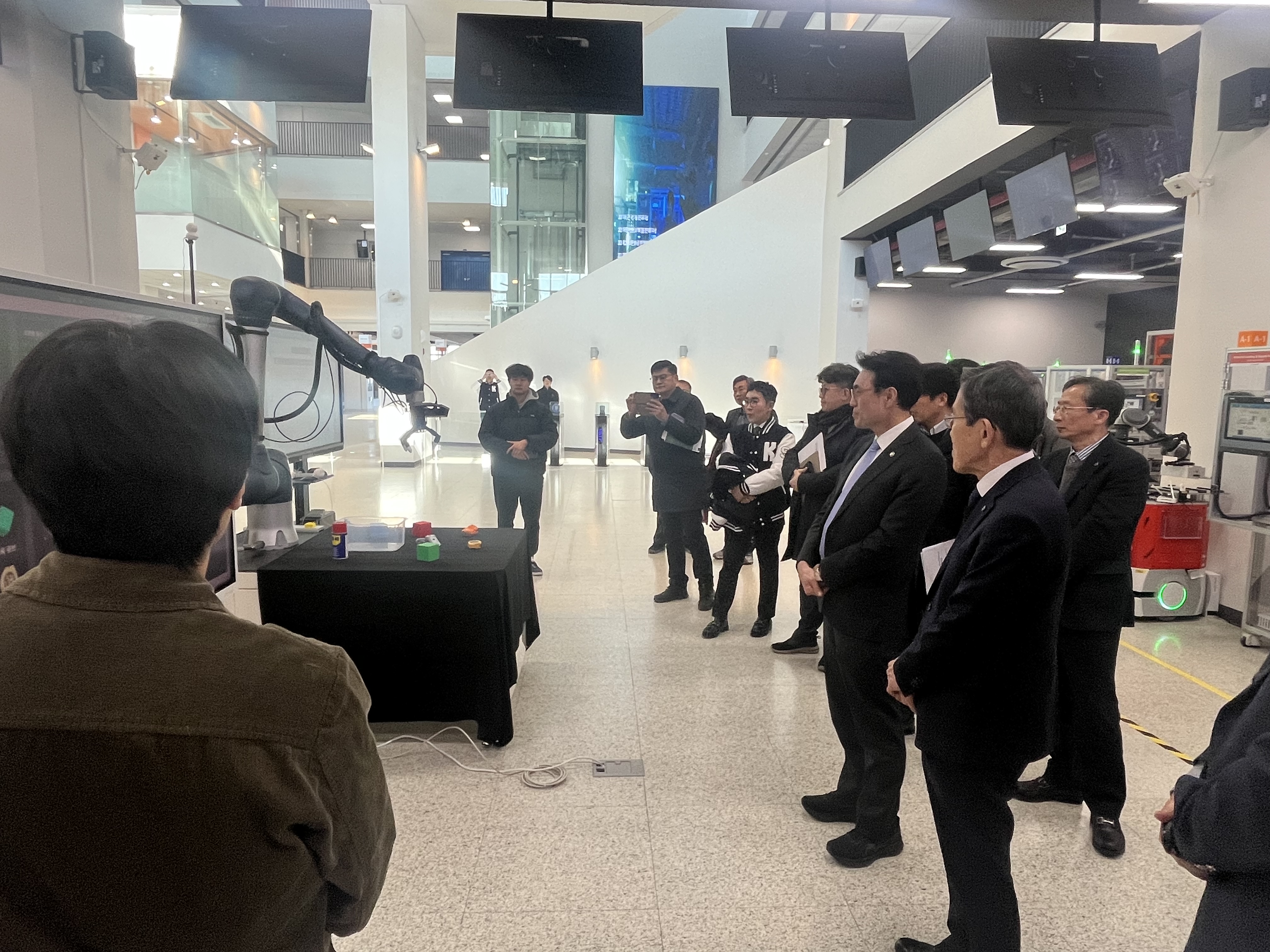
조재민 박사과정이 권창준 고용노동부 차관의 "청년 AI 인재양성 강화를 위한 현장 방문"에서 Physical AI 기술 시연을 진행함
"Deep Reinforcement Learning-Based Adaptive Scheduling for Wireless Time-Sensitive Networking" Sensors에서 Editor's choice paper로 선정되었다.
2025년 12월 2일, 새로운 국제 특허가 추가 등록되면서 SmartCPS 연구실은 총 5개의 국제 특허를 보유하게 되었다. 1. APPARATUS FOR AND METHOD OF SIMULATING ROBOT ARM MOTION PLANNING, TO WHICH CURRICULUM-BASED DEEP REINFORCEMENT LEARNING APPLIES 2. METHOD AND APPARATUS FOR SPATIAL REUSE BASED ON INTERFERENCE RECOGNITION 3. METHOD AND APPARATUS FOR DIGITAL TWIN-BASED BEAMFORMING 4. AI DIFFERENTIATION BASED HW-OPTIMIZED INTELLIGENT SOFTWARE DEVELOPMENT TOOLS FOR DEVELOPING INTELLIGENT DEVICES 5. NETWORK CONTROL METHOD FOR HANDOVER IN MOBILE TSN COMMUNICATION SYSTEM
2026년 대학원생 7명(박사과정 이민철 이영훈, 석박통합 문주성, 석사과정 이민석, 정찬우, 김성민), 학부연구생(4학년 정준호, 윤성민, 3학년 이서이) 환영합니다!
2025년 한국전기전자학회 하계학술대회에서 조든솔, 남태민, 조재민 박사과정이 ”자동차 제조 소프트웨어 정의 공장에서의 공장 제어/로봇 제어 인공지능 융합 유즈케이스“ 논문으로 우수 논문 상을 수상함

한국기술교육대학교 컴퓨터공학부 김원태 교수 연구팀이‘현대자동차 E-FOREST 테크데이 2025’에 참가해 작업자 협동형 Physical AI 로봇 기술을 선보였다.
권준형 박사과정이 KMF2025 글로벌 컨퍼런스 세션에 연사(speaker)로 참가하여 산업 메타버스 기술 및 표준화 동향을 주제로 발표함

"이종 로봇을 위한 LLM 기반 적응형 제어 코드 생성 프레임워크"라는 주제로 ACK 2025 참석 및 온디바이스 AI 기능/성능/SW플랫폼 기술 및 협력 워크숍에서 이영훈 석사과정이 발표를 진행함
한국-덴마크간 Horizon Europe(FP9) 국제공동 프로젝트 발굴을 위한 국내 주요인사 초청 워크샵에 참석하여, 덴마크 내 우수대학(SDU 등) 교수진과의 기술 교류를 수행하였음

현대차 직원들과 E-forest 시연에 대비하며, 음성 인식 기반 로봇 제어 기술과 이종간 로봇 Job file TDL 변환 기술을 선보임.

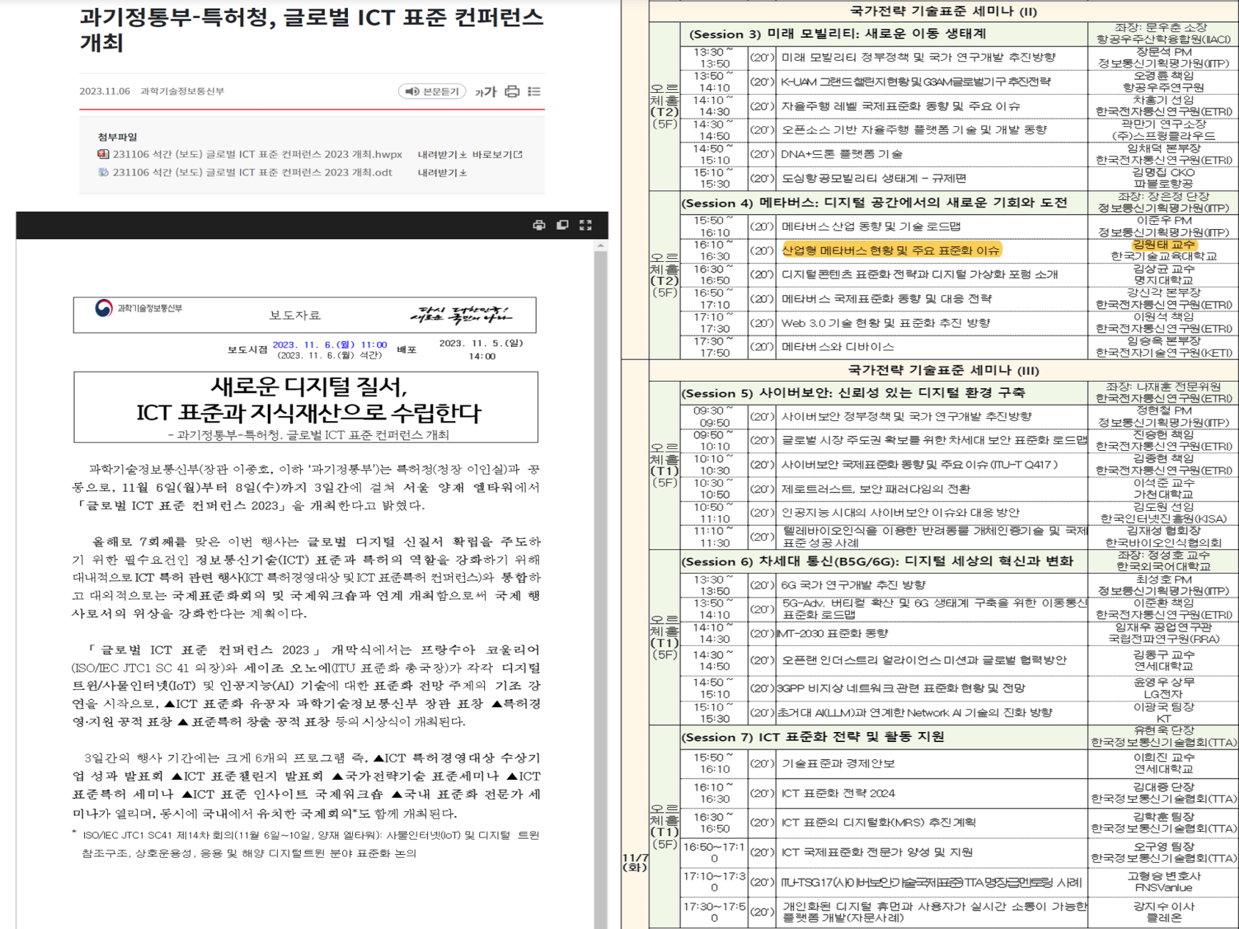
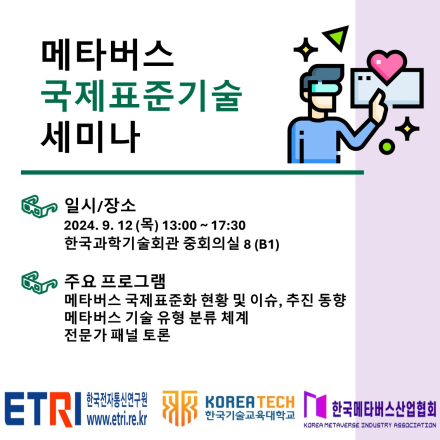
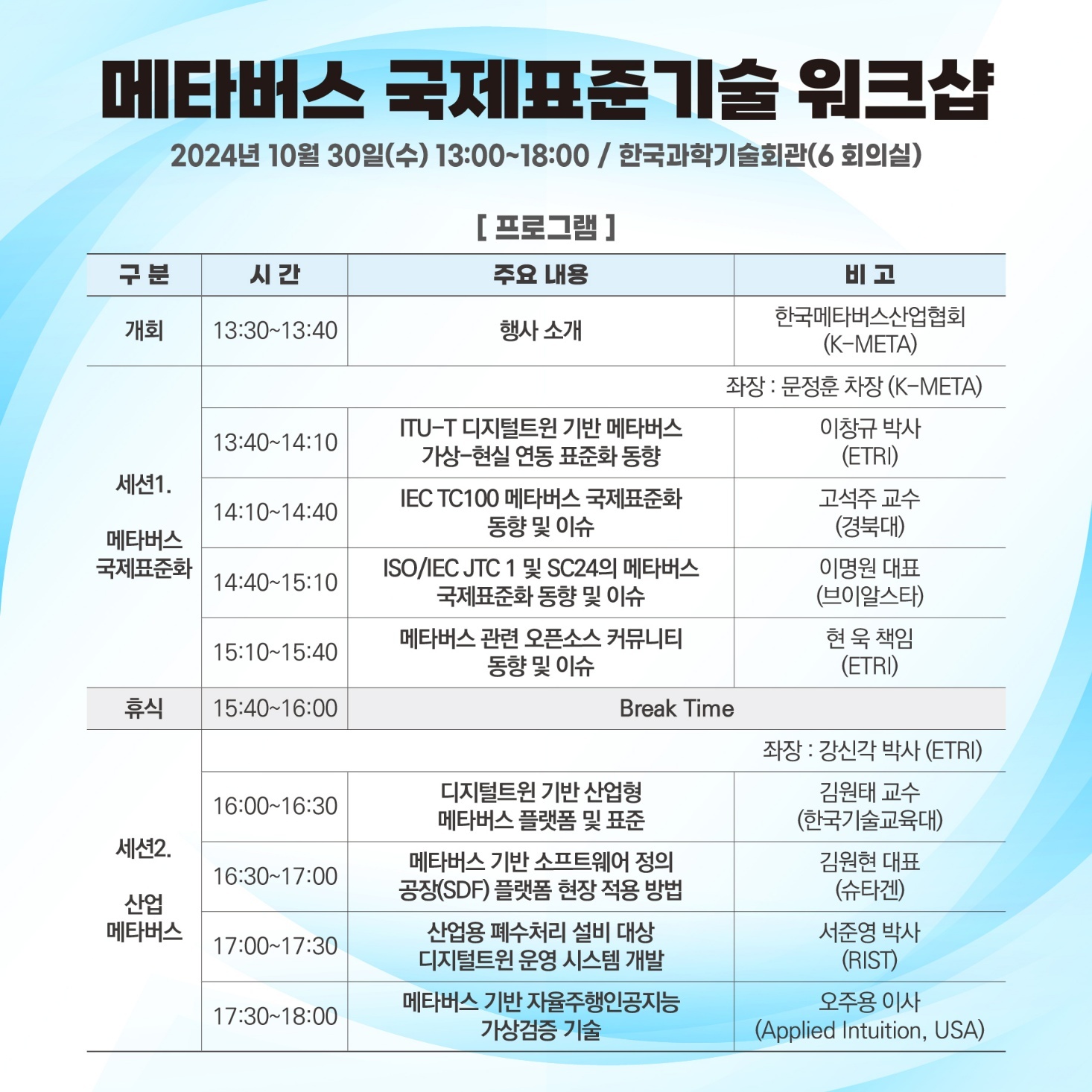
한국전자통신연구소(ETRI), 한국기술교육대학교, 한국메타버스 산업협회 주관으로 진행된 메타버스 국제 표준 기술 워크샵(소노펠리체 컨벤션)에서 김원태 교수가 좌장 역할을 맡아 메타버스 기술의 국제 표준화 동향과 미래 발전 방향에 대해 심도 있는 논의를 이끌며 워크샵을 진행함

2025.7.29 - 30일자에 계룡대 육군 본부와 한국상용SW협회에서 공동으로 개최한 2025년 육군 SW 개발 컨퍼런스에 김원태 교수가 참가하여, AI 대전환 시대의 디지털 트윈 기반 국방무기체계 SW 개발 전략에 대해 발표함
The 7th International Conference on Materials and Intelligent Manufacturing (ICMIM 2025)에 참가하였음
ITU-T Study group 21 Working party 4 산하 Q9/21 라포쳐 미팅 참석 및 technical paper "Metaverse Maturity Levels" 기고

KEIT 산하 "온디바이스 AI 응용 SW 기능 및 성능 검증 프레임워크 핵심기술 개발" 과제 킥오프 워크샵에서 권준형 박사과정이 발표를 진행함
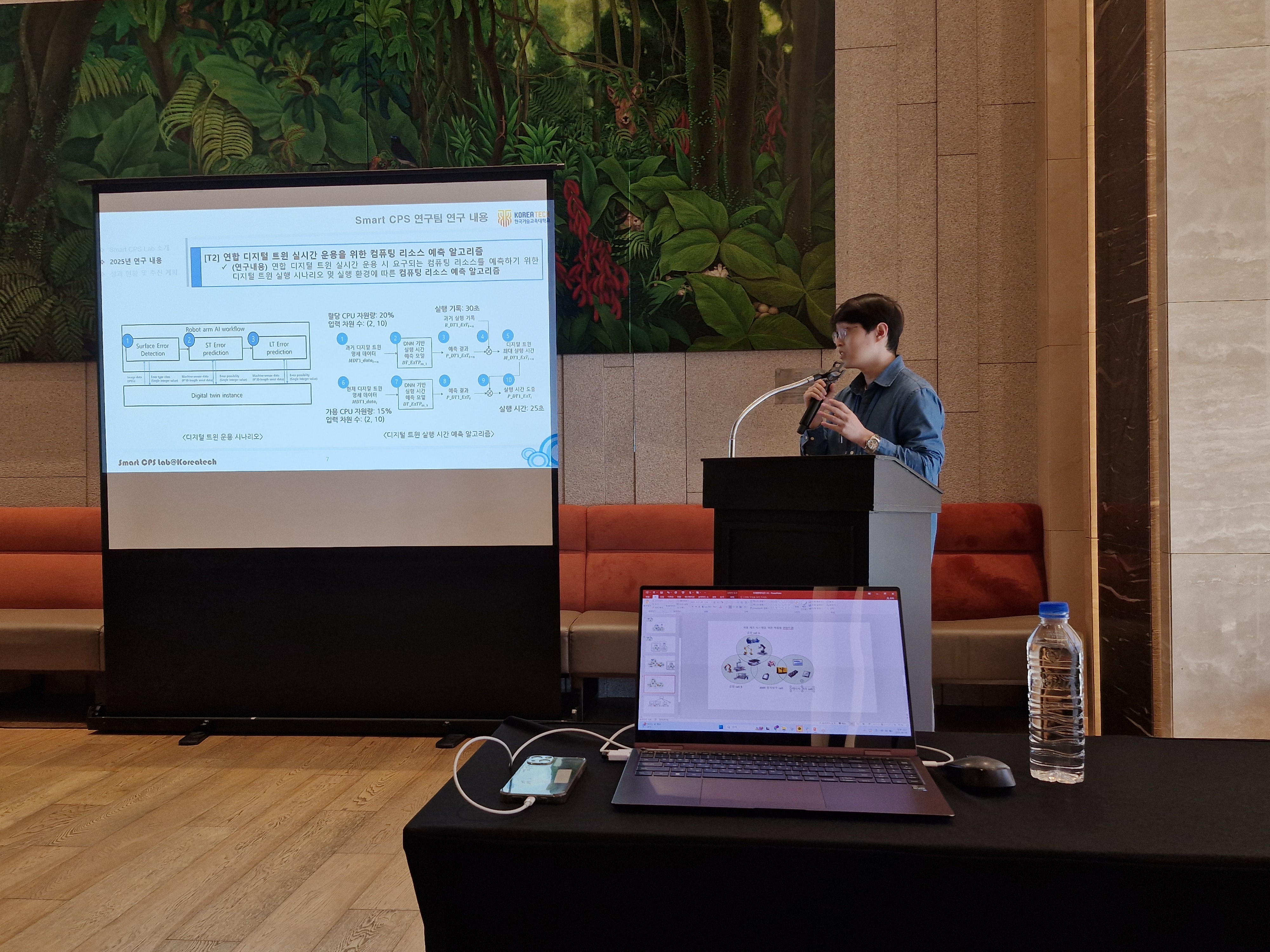
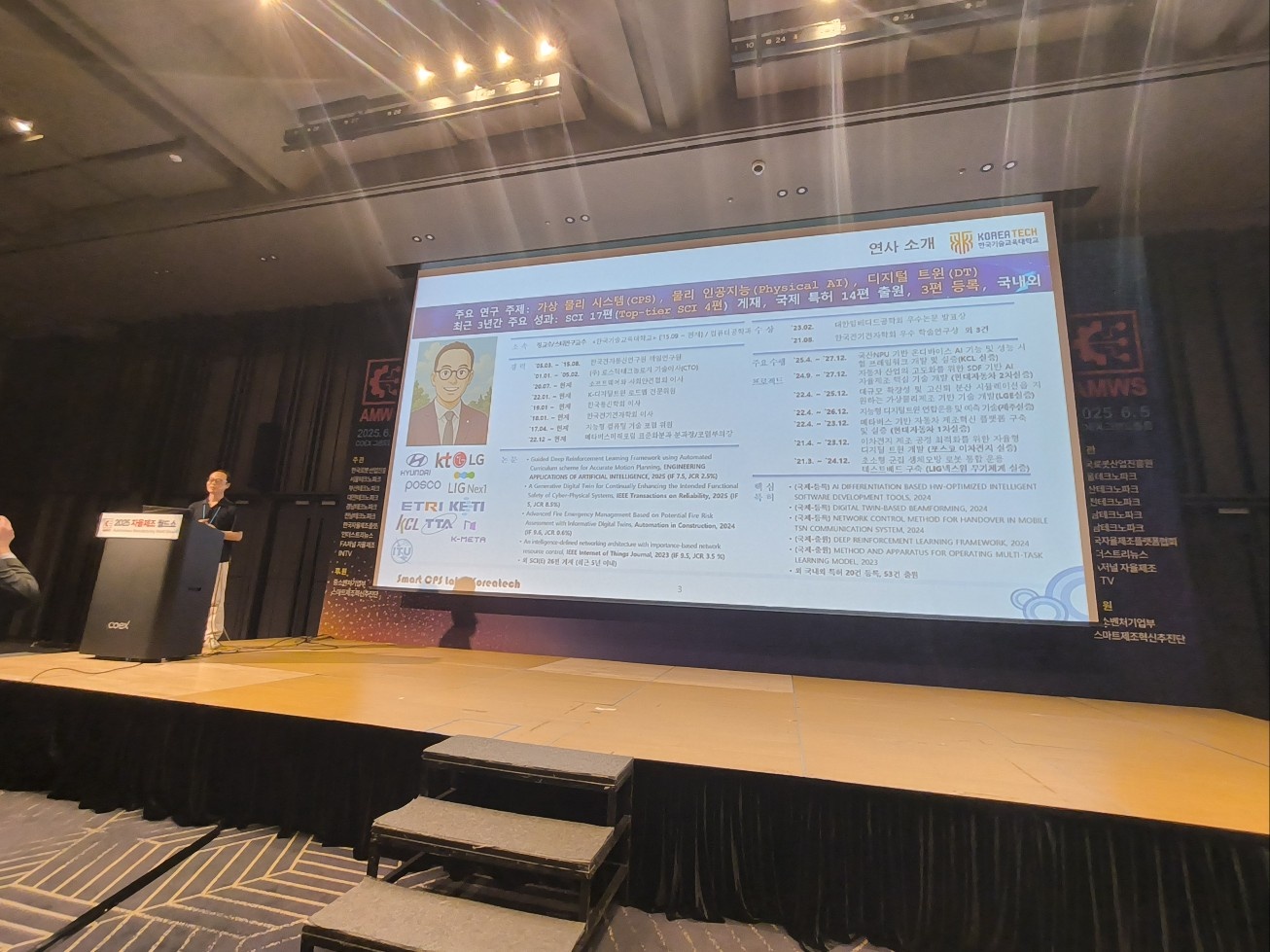
2025년 6월 5일, 서울 코엑스에서 진행되는 2025 자율 제조 월드쇼에서 김원태 교수가 미래 자율제조공정을 위한 디지털트윈 기반 소프트웨어정의공장 아키텍쳐에 대한 발표를 진행함.
THE 35th JOINT CONFERENCE ON COMMUNICATIONS AND INFORMATION (JCCI)에서 이영훈, 이민철, 안와르 루밥 석사과정이 각 메타버스, 디지털 트윈 분야에 대해 구술 발표를 진행하였음
초격차 디지털 전환을 견인하는 초융합 인프라 구상: Designing Hyper-converged Infrastructure for Exo-Gap Digital Transformation

Back to News KEIT 산하 "온디바이스 AI 응용 SW 기능 및 성능 검증 프레임워크 핵심기술 개발" 과제 킥오프 워크샵 일자: 2025.06.17 내용: KEIT 산하 "온디바이스 AI 응용 SW 기능 및 성능 검증 프레임워크 핵심기술 개발" 과제 킥오프 워크샵에서 권준형 박사과정이 발표를 진행함 링크: -

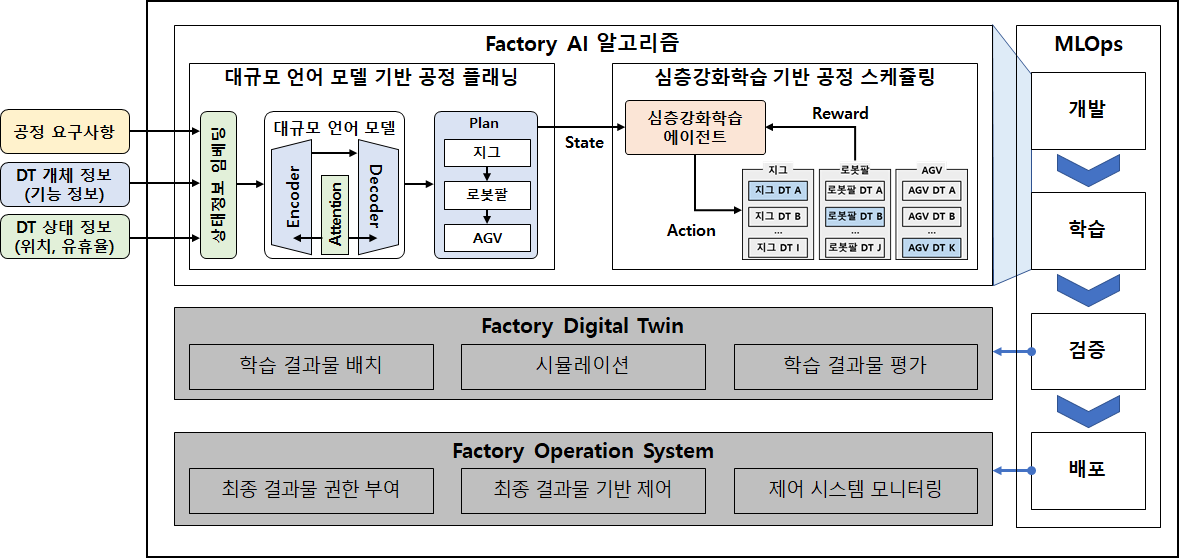
SDF(Software defined factory) 개념에 입각한 인공지능 기반 최첨단 자율 제조 핵심 기술 개발 및 현대자동차 제조 공정으로의 실증 적용을 위한 연구 과제인 ‘‘자동차 산업의 고도화를 위한 SDF 기반AI 자율제조 핵심 기술 개발’을 신규 수주함 현대자동차, 한국전자통신연구원, 한국생산기술연구원, 한국기계연구원, UNIST 및 울산광역시 지자체와의 협력 연구를 통하여 2027년 현대자동차 울산공장 실증을 목표로 하고 있음 SmartCPS 연구실은 핵심 기술인 대규모 언어 모델 기반 SDF 제조 공정 적응형 플래닝 기술, 심층강화학습 기반 SDF 제조 공정 스케줄링 기술, MLOps 워크플로우 기술 연구를 수행한다.

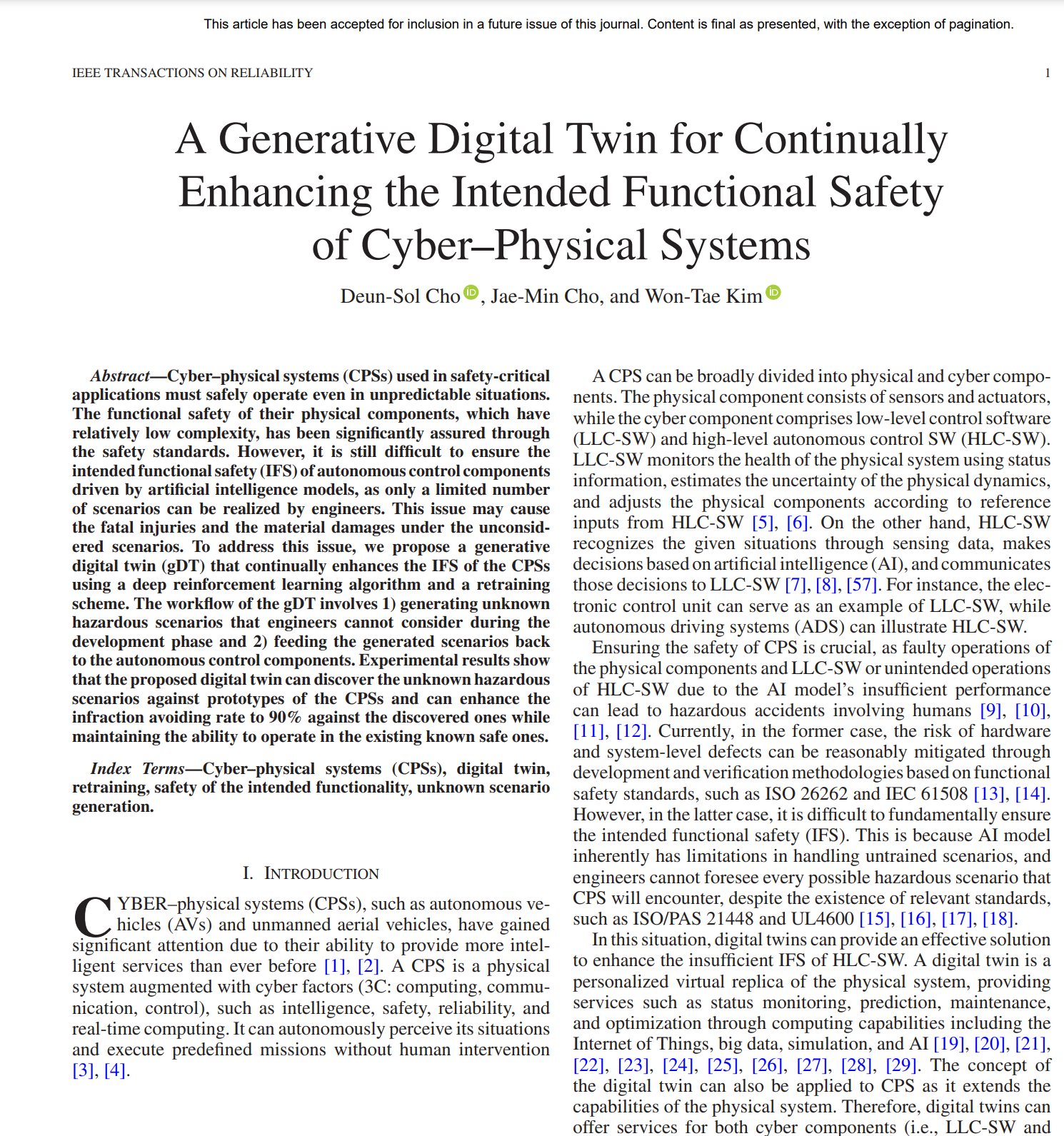
SmartCPS 연구실 소속 조든솔 박사과정, 조재민 석사과정이 신뢰성 분야 최고 수준 학술지인 IEEE Transactions on Reliability (IF 5.9 JCR 상위 9.04%)에 자율형 CPS 신뢰성 보장을 위한 디지털 트윈 기술 연구 성과인 'A Generative Digital Twin for Continually Enhancing the Intended Functional Safety of Cyber–Physical Systems' 논문을 게재함
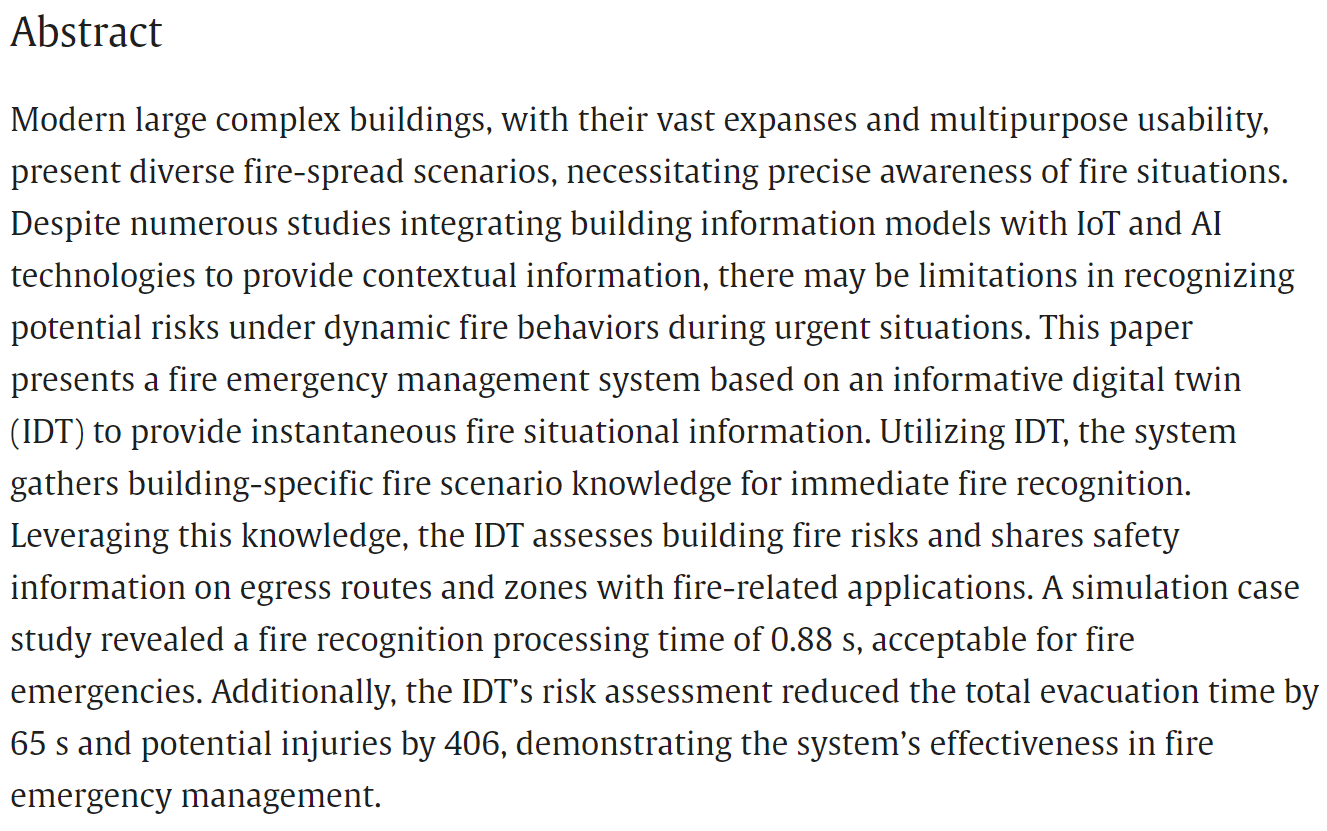
SmartCPS 연구실 소속 김영진 박사후연구원, 김한진 박사과정이 도시공학 분야 최고 수준 학술지인 Automation in Construction (IF 9.6 JCR 상위 0.3%)에 고신뢰 화재 감지를 위한 디지털 트윈 기술 연구 성과인 'Advanced Fire Emergency Management Based on Potential Fire Risk Assessment with Informative Digital Twins' 논문을 게재함
신뢰성 높은 자율주행을 위한 첨단 운전자 지원 시스템을 위한 ‘분산 시뮬레이션 기반 첨단 운전자 지원 시스템’ 및 자율형 로봇 시스템을 위한 ‘지능형 시스템 개발을 위한 자율 가상 커미셔닝 기반의 인공지능 적응화 플랫폼,시스템 및 방법’ 기술 설명 진행
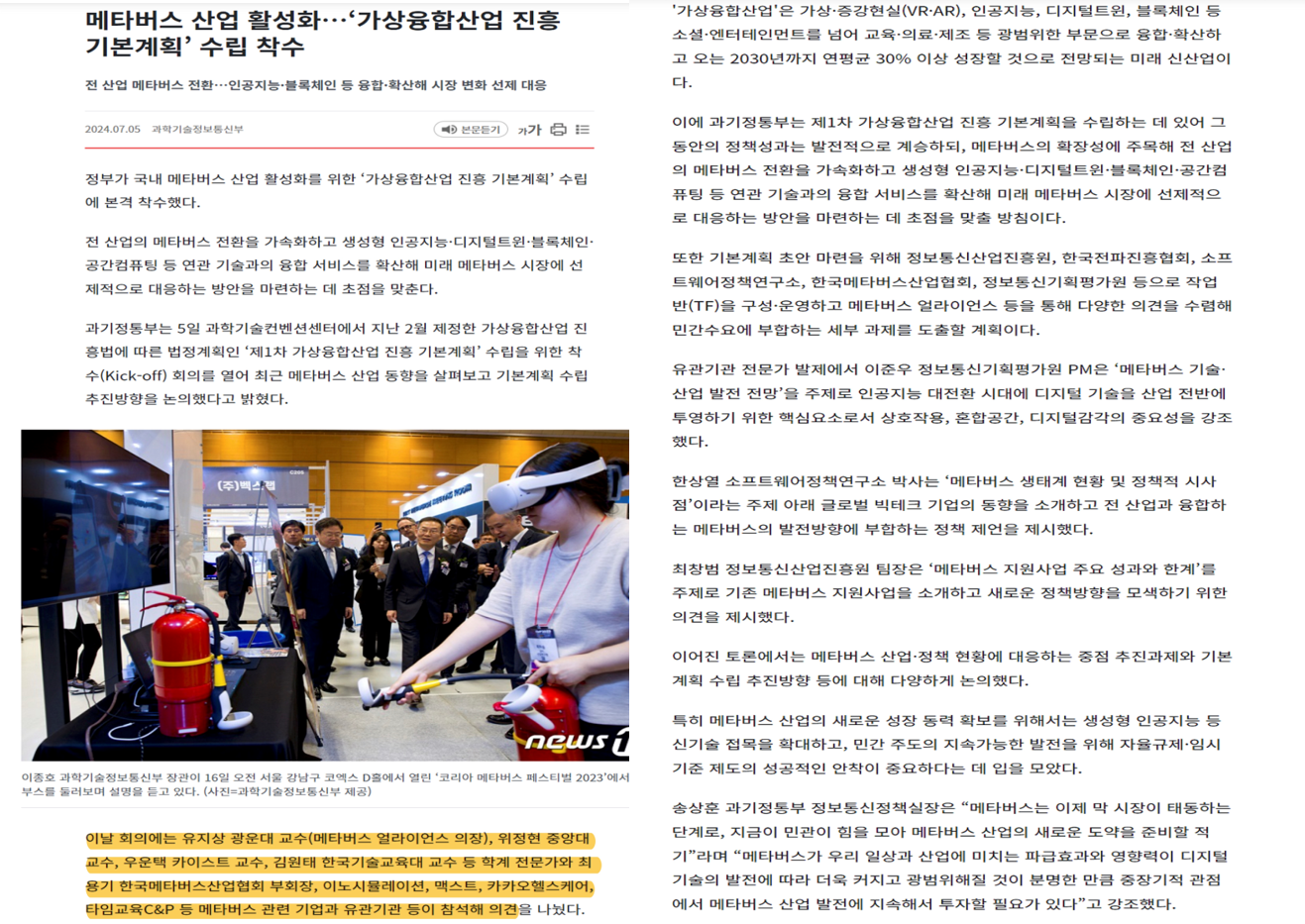
SmartCPS 연구실은 메타버스 핵심 기술 선행적 개념 정립, 표준 개발을 통한 국제 표준화 주도권 확보와 국내 표준화 역량 강화를 위한 국가 R&D 과제인 메타버스 표준전문연구실 과제 수주에 성공함 한국전자통신연구원 표준 본부, 한국메타버스산업협회와의 공동 연구를 통해 메타버스 국제 표준화를 목표함 SmartCPS 연구실은 메타버스 레벨, 산업 메타버스 등 미래 메타버스 혁신기술 표준개념 정립과 기술 보고서 개발 및 제안과 관련된 국제 표준화 추진을 수행할 예정임
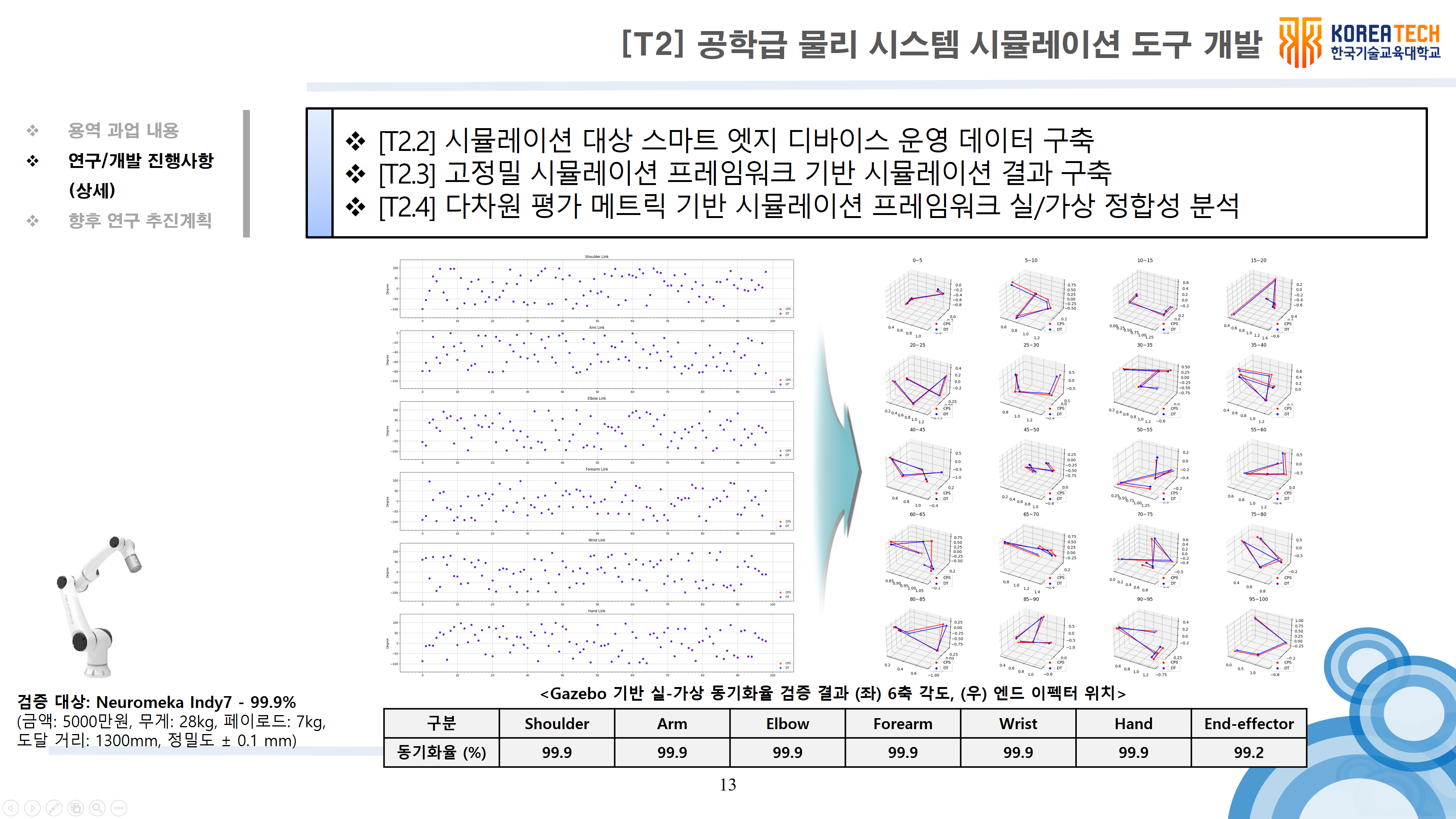
![한국정보처리학회 ACK 2024, "스마트 엣지 디바이스 기능/성능 검증을 위한 고정밀 시뮬레이션 프레임워크 개발" 발표 [2024-11-01]](/legacy/images/2024/news/%EB%A9%94%ED%83%80%EB%B2%84%EC%8A%A4%ED%91%9C%EC%A4%80%EC%88%98%EC%A3%BC.png)
"개방형 스마트 엣지 디바이스 개발 플랫폼 기술 개발 성과 발표 워크숍"에서 스마트 엣지 디바이스 기능/성능 검증을 위한 고정밀 시뮬레이션 프레임워크 개발에 대한 발표 수행
산업부가 26개 AI자율제조 선도프로젝트를 공개하였다. 민-관 합동 3조7000억원 투자금을 확보한 AI자율제조 선도프로젝트에서, SmartCPS는 AI와 로봇을 활용해 공정 계획과 스케줄을 최적화하고 수요에 맞게 물류와 생산 경로를 실시간으로 조정해 하나의 생산 라인에서 여러 차종을 생산하는 다품종 유연생산 시스템을 구축하는 역할을 수행할 예정이다.
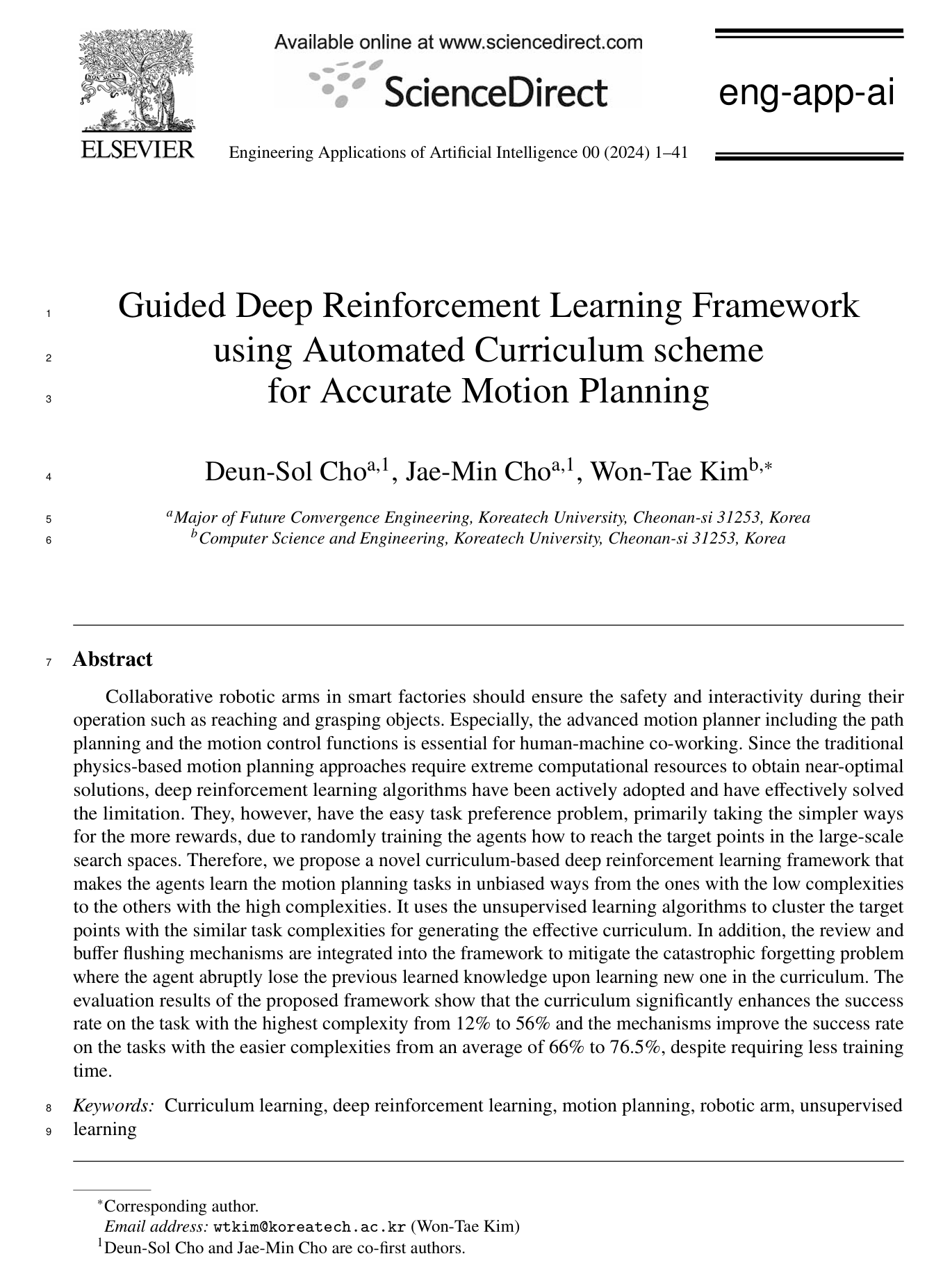
SmartCPS 연구실 소속 조든솔 박사과정, 조재민 석사과정이 인공지능/CPS 분야 최고 수준 학술지인 Engineering applications of artificial intelligence (IF 7.5, JCR 상위 2%)에 "산업융합형 메타버스 기반 자동차 제조 공정 최적화 프레임워크" 연구 과제의 성과인 "Guided Deep Reinforcement Learning Framework using Automated Curriculum scheme for Accurate Motion Planning" 논문 게재 승인을 받음
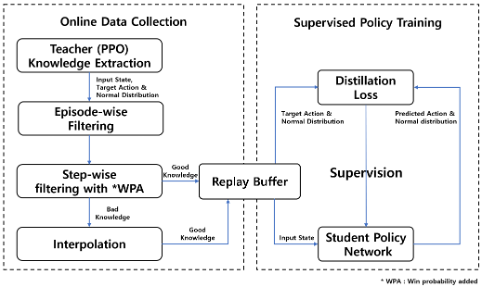
SmartCPS 연구실 소속 신길종 석사과정, 윤성진 박사과정이 우수 학술지인 IEEE Access에 (IF 3.04 JCR 34.5%)에 자율형 CPS를 위한 강화학습 제어 모델 최적화 기술인 ‘A novel policy distillation with WPA based knowledge filtering algorithm for efficient industrial robot control' 논문을 게재함
인공지능 기술을 기반한 미래 스마트 제조 현장을 위한 CPS, 디지털 트윈 기술 현황 소개 및 미래 발전 방향 인사이트 전달








![이민석, 김성민 [학부연구생] 입학을 축하합니다!](/legacy/images/2025/ICMIM_1.jpg)
![조재민, 남태민 [박사과정], 장연재, 사밀라 밀라 [석사과정] 입학을 축하합니다!](/legacy/images/2025/ITU.png)