대규모 버추얼 팩토리를 위한 고신뢰 디지털 트윈 플랫폼
- 연구기간: 2017.03 ~ 2020.02
- 협력기관: 단독 수행
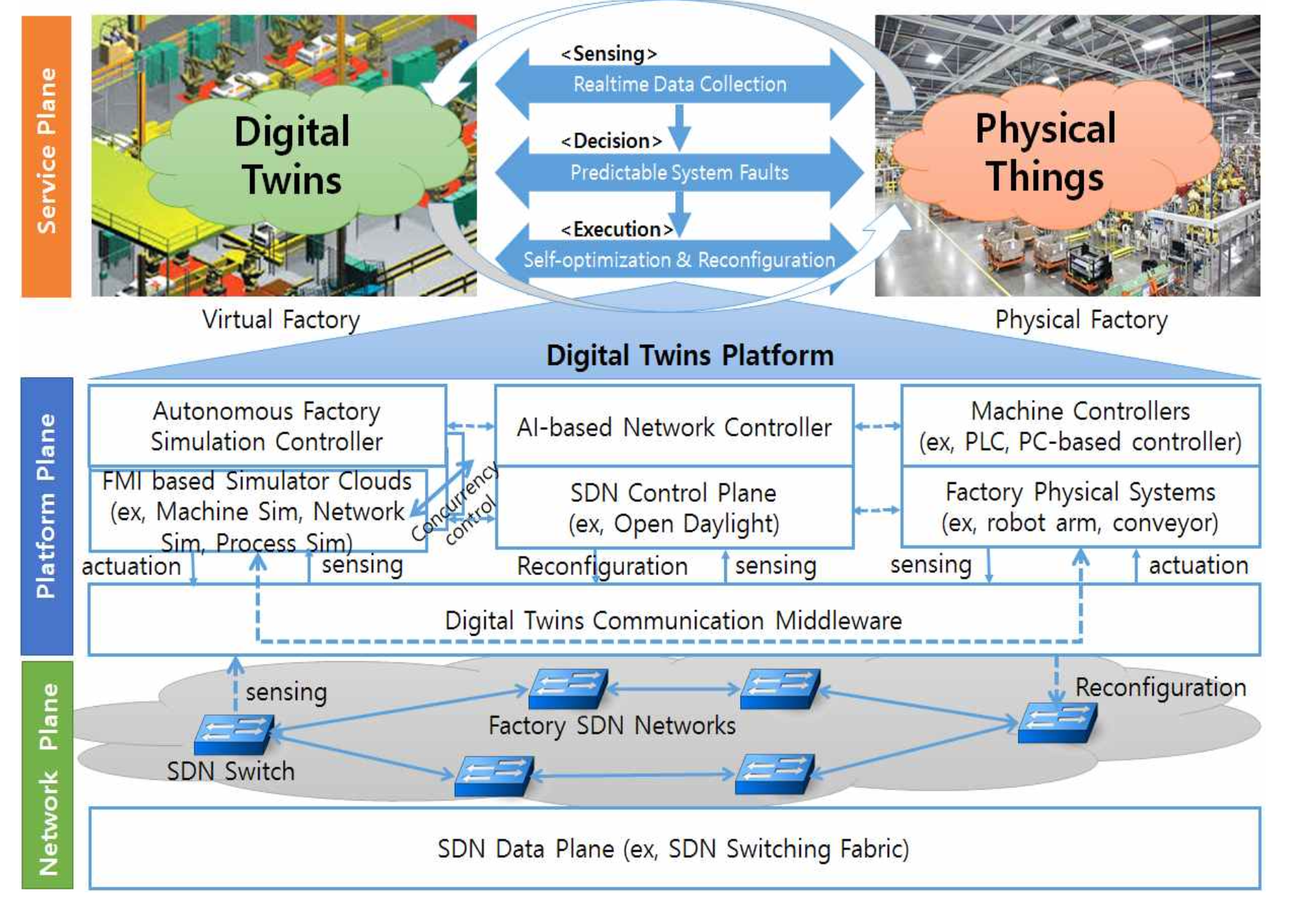
- 연구목적: 4차 산업혁명의 기반인 버추얼 팩토리를 구현하기 위한 디지털 트윈 플랫폼의 핵심기술들과 통합 플랫폼 개발
- 연구내용: 이종 시뮬레이터간 동시 시뮬레이션 기반 디지털트윈 최적화 기술, 대규모 디지털 트윈 연동을 위한 데이터 중심 통신 미들웨어 기술, 기계학습 네트워크 컨트롤러 기반 동적 SDN 제어 기술
- 주요성과: FMI/DDS 기반 분산 시뮬레이션 기술, 지능 제어 네트워킹 기술, 실시간 TSN 기술